
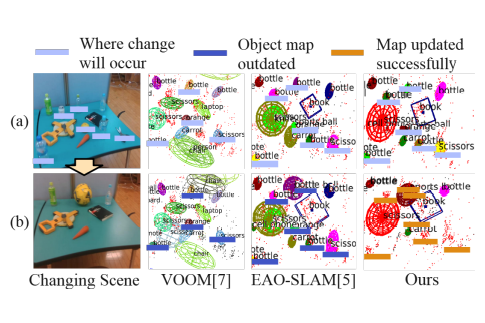
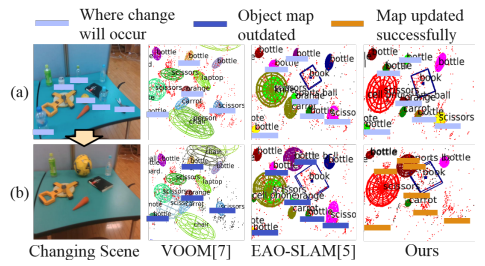
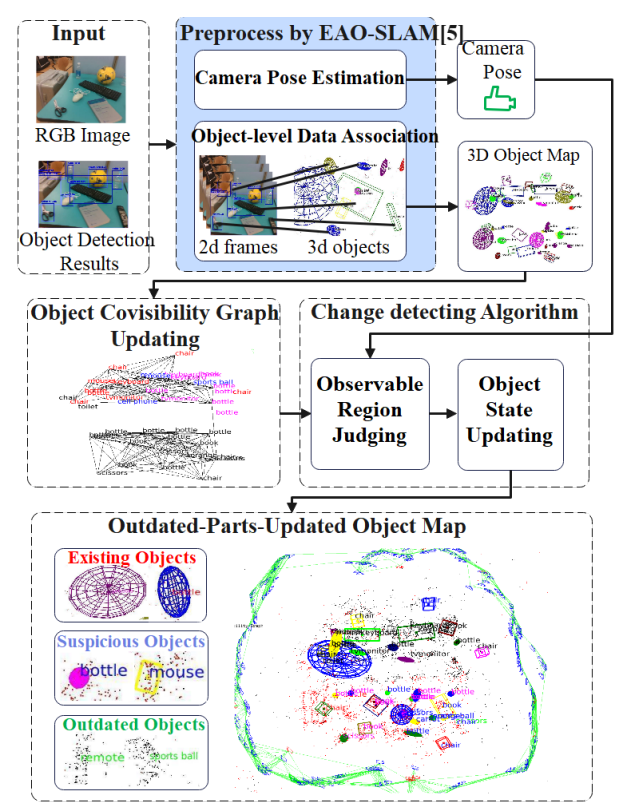
Recently, Object-oriented SLAM(Object SLAM) has attracted extensive research due to its ability to perceive the environment at a 3d object level. Existing object SLAM methods mostly focus on constructing 3d object map for static objects or mitigating the impact of currently dynamic objects on localization and mapping. However, detection of semi-static objects whose position change while unobserved still pose a significant challenge, resulting in outdated maps, which could lead to localization and robot application failures. In this paper, we propose a method to compare current observation with the existing map, enabling the continuous detection and updating of outdated sections within the map caused by position-changing semi-static objects. First, we introduce Object Covisibility Graph(OCG) to maintain the historically observed co-visibility relationships between objects. Building on this, we design an algorithm that uses the OCG to determine whether the current camera is within the observable region of each object, and subsequently implement an object state updating algorithm to detect and update outdated sections continuously. We conduct experiments on our self-make dataset with changing objects and a dataset with only static objects. The experimental results show that our method updates the outdated parts of the map more effectively compared to previous studies.
最近、3次元オブジェクトレベルで環境を認識できるObject-level Visual SLAM(Object SLAM)が広範に研究されています。既存のObject SLAM手法の多くは、静的物体の3次元マップの構築や、現在観測されている移動物体(動的物体)がSLAMに与える影響の緩和に焦点を当てています。しかし、観測されていない間に位置が変わる物体(準静的物体)の検出はまだ大きな課題であり、これによって地図が古くなると、位置推定やロボットアプリケーションに支障が生じる可能性があります。本論文では、現在の観測と既存のマップを比較する手法を提案し、位置が変わる準静的物体によって生じるマップの古くなった部分を継続的に検出・更新することを可能にします。まず、Object Covisibility Graph(OCG)を導入し、オブジェクト間の過去に観測された共視性の関係を保持します。これを基に、OCGを使用して現在のカメラが各オブジェクトの観測可能な領域内にあるかどうかを判断するアルゴリズムを設計し、さらに古くなった部分を継続的に検出・更新するためのオブジェクト状態更新アルゴリズムを実装します。静的・準静的物体を含む自作のデータセットと静的物体のみのデータセットで実験を行い、その結果、提案手法が従来の研究と比較して地図の古くなった部分をより効果的に更新することを示しました。
Publication
Ziquan Wang, Masahiko Mikawa, and Makoto Fujisawa. “Object Covisibility Graph for Change Detection and 3D Object-Oriented Map Revision in Semi-Static Scenes” 2025 IEEE/SICE International Symposium on System Integrations (SII 2025)